



球速体育新闻
News Center 更新时间:2026-05-20
更新时间:2026-05-20 点击次数:
点击次数: 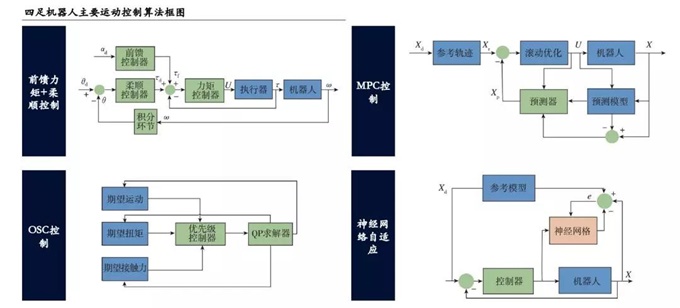
本发明涉及一种基于模型的足式机器人步态转换方法,属于仿生四足机器人步态研究领域。
1、从大量的生物学研究表明,动物为了降低运动过程所产生的能耗,往往根据运行速度对步态进行切换,从而达到维持体能的效果。四足仿生机器人未来的发展趋势就是在负重的前提下适应不同的路况条件,且保证其有足够的续航能力,这就要求机器人能像生物一样调整步态,使得能量消耗最低,这就需要研究不同步态之间的切换控制算法。因此无论是从生物特性来说,还是从机械方面来讲,对不同地形特征适当调整步态来满足行走环境的要求是一项具有挑战性的工作。
2、目前在四足机器人步态转换上主要应用两种方法进行,一种是模拟生物低级神经控制系统的方法,称之为中枢模式发生器(cpg)算法;另一种是基于模型的控制方法。目前使用较多的步态切换主要是中枢模式发生器算法,例如清华大学设计的biosbot四足机器人,利用cpg控制原理实现了walk步态向trot转换。为了解决直接替换步态矩阵使得步态转换过程中出现的锁相、停振和尖角问题,北京理工大学那奇等利用hopf振荡器搭建了cpg控制网络,充分考虑了足内和足间耦合关系,通过改变神经振荡器本身的特性实现了步态的平滑转换。陈久朋等提出了一种分段函数结合cpg控制算法,成功实现了在特定时刻步态转换,可实时控制转换时间节点。尽管cpg步态控制方法在步态切换上获得了较好的应用效果,但是其数学模型存在较大的局限性,应用到机械本体上存在较大的困难。
3、在基于模型的控制方法上,wang等人将静步态和动步态建立了统一的数学模型,通过改变参数来实现步态转换。koo和zhao基于能量消耗原理规划了机器人的步态转换过程。罗红艳等提出同时改变相位与机器人足端轨迹的方法来达到步态切换的效果,可实现步态的实时转换。为了达到步态切换平滑稳定,辛亚先等利用改进的泛稳定裕度(widestability margin method)判别法,通过调整足端与质心的相对位置,消除步态转换过程中由惯性力导致的零力矩点后移对稳定性的影响。综上所述,基于模型所规划出来的足端轨迹在采用单一步态行走方面可以达到良好的控制效果,但是两种步态之间若想实现平滑切换不是一件容易的事。以上的步态转换方法均未考虑步长和周期变化引起的稳定性和平滑性问题。
1、本发明提供了一种基于模型的足式机器人步态转换方法,以用于实现足式机器人步态的平稳转换。
2、本发明的技术方案是:一种基于模型的足式机器人步态转换方法,包括:给定足式机器人理想足端轨迹;依据理想足端轨迹,获取足式机器人每个单腿髋、膝关节的驱动转角;将获得的髋、膝关节的驱动转角加上足式机器人对应单腿的初始髋、膝关节角度;使用延时模块获得具有不同占空比的足式机器人行走的步态模式;依据获得的足式机器人行走的步态模式,引入基于模型的控制实现足式机器人步态转换的定速度控制和变步长控制。
3、所述足式机器人行走的步态模式至少包括静态步态、对角步态;在静态步态行走时,其行走相序为左前腿-右后腿-左后腿-右前腿,每个腿之间的相位差为0.25;在对角步态行走时,左前腿和右后腿、右前腿和左后腿具有相同的运动模式,对角腿之间的相位差为0.5。
4、所述引入基于模型的控制实现足式机器人步态转换的定速度控制和变步长控制,包括:
6、将过渡段周期引入到轨迹中,获得过渡段周期下的髋、膝关节驱动转角;再将延时模块中的延时时间设置为过渡段延时时间,实现两种步态的平滑切换。
7、所述过渡段周期具体为:将过渡段右边界、过渡段左边界的差值作为被除数,将初始延时与一正整数相加的值作为除数,被除数与除数相除所得商作为过渡段周期。
8、所述依据过渡段周期,确定过渡段延时时间,具体为:将转换前后基本周期与初始延时的差值、过渡段周期两者相乘,获得过渡段延时时间。
9、所述定速度控制具体为:转换前后步长和周期均不发生改变;所述变步长控制具体为:引入步长变化函数控制转换前后步长发生改变,而周期不变。
10、本发明的有益效果是:本发明通过引入基于模型的控制实现足式机器人步态转换的定速度控制和变步长控制,同时对基于模型的控制中涉及到的两种步态切换方法(定速度控制和变步长控制算法)进行了实例分析,步态切换过程平稳无突变现象发生,证明了该算法的有效性。该算法同时考虑了步态切换前后速度和相位差的改变,不仅实现步态切换的过程的稳定性,同时大大提高了步态的切换效率。
2.根据权利要求1所述的基于模型的足式机器人步态转换方法,其特征在于,所述足式机器人行走的步态模式至少包括静态步态、对角步态;在静态步态行走时,其行走相序为左前腿-右后腿-左后腿-右前腿,每个腿之间的相位差为0.25;在对角步态行走时,左前腿和右后腿、右前腿和左后腿具有相同的运动模式,对角腿之间的相位差为0.5。
3.根据权利要求1所述的基于模型的足式机器人步态转换方法,其特征在于,所述引入基于模型的控制实现足式机器人步态转换的定速度控制和变步长控制,包括:
4.根据权利要求3所述的基于模型的足式机器人步态转换方法,其特征在于,所述过渡段周期具体为:将过渡段右边界、过渡段左边界的差值作为被除数,将初始延时与一正整数相加的值作为除数,被除数与除数相除所得商作为过渡段周期。
5.根据权利要求3所述的基于模型的足式机器人步态转换方法,其特征在于,所述依据过渡段周期,确定过渡段延时时间,具体为:将转换前后基本周期与初始延时的差值、过渡段周期两者相乘,获得过渡段延时时间。
6.根据权利要求1所述的基于模型的足式机器人步态转换方法,其特征在于,所述定速度控制具体为:转换前后步长和周期均不发生改变;所述变步长控制具体为:引入步长变化函数控制转换前后步长发生改变,而周期不变。
本发明公开了一种基于模型的足式机器人步态转换方法,包括:给定足式机器人理想足端轨迹;依据理想足端轨迹,获取足式机器人每个单腿髋、膝关节的驱动转角;将获得的髋、膝关节的驱动转角加上足式机器人对应单腿的初始髋、膝关节角度;使用延时模块获得具有不同占空比的足式机器人行走的步态模式;依据获得的足式机器人行走的步态模式,引入基于模型的控制实现足式机器人步态转换的定速度控制和变步长控制。通过对基于模型的控制中涉及到的两种步态切换方法(定速度控制和变步长控制算法)进行实例分析,步态切换过程平稳无突变现象发生,证明了该算法的有效性。
1.振动信号时频分析理论与测试系统设计 2.汽车检测系统设计 3.汽车电子控制系统设计

电子邮箱: facai@126.com

热线电话: 0755-89800918

公司地址: 深圳市南山区粤海街道高新区社区深圳湾创新科技中心2栋A座22层

Copyright © 2012-202X 球速体育公司 版权所有 Powered by EyouCms
备案号:粤ICP备05004158号-1

 当前位置:
当前位置:  家庭陪伴
家庭陪伴 


